Example¶
Map Matching¶
The noiseplanet package provides different tools for matching a track to the Open Street Map network.
- matching to the nearest edge,
- hmm based matching. To match a track, composed by latitudes and longitudes, use :
Firt, import the following packages :
import numpy as np
import osmnx as ox
from noiseplanet import matcher
import numpy as np
import osmnx as ox
from noiseplanet import matching
track = np.array([[45.7584882 , 4.83585996],
[45.75848068, 4.83586747],
[45.75849549, 4.83585205],
[45.75849134, 4.83584647],
[45.75848135, 4.8358245 ],
# ...
[45.75846756, 4.83580848],
[45.75844998, 4.83580936],
[45.7584067 , 4.83580086],
[45.7584067 , 4.83580086],
[45.75839346, 4.83579883]])
graph = matching.model.graph_from_track(track)
track_coor, route_corr, edgeid, stats = matching.match(graph, track, method='hmm')
And visualize the results :
from noiseplanet.ui import plot_html
# Plot the graph
plot_html(track, track_corr=track_corr, route_corr=route_corr,
proj=True, show_graph=True)
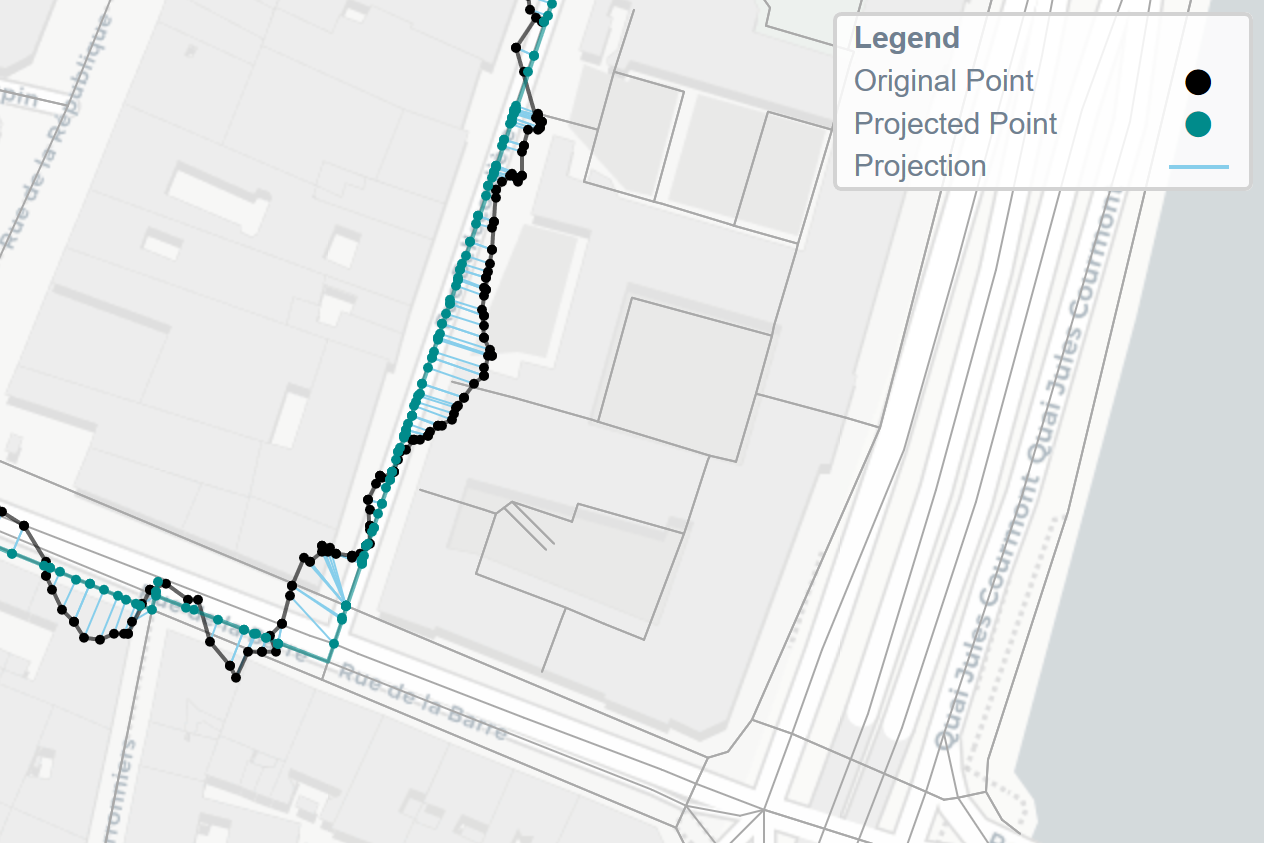
You can change the matching method. For example, the above method uses Hidden Markov Models, and is the best way to match a track on the OSM (see the report for more details). However, you can use a naive method to match the track on the nearest road :
track_coor, route_corr, edgeid, stats = matcher.match(graph, track, method='nearest')
And visualize the results :
from noiseplanet.ui import plot_html
# Plot the graph
plot_html(track, track_corr=track_corr, route_corr=route_corr,
proj=True, show_graph=True)
